Image Restoration
훼손된 영상을 최대한 복원해보는 방식에 대해 알아봅니다.읽는데 9분 정도 걸려요.이미지 훼손은 아래와 같은 공식에 의해 이루어졌다는 가정하에 진행됩니다.
따라서 현실 세계의 훼손을 복원할 때는 제대로 동작하지 않습니다.
: 훼손 함수
: 노이즈
즉, 이미지를 복원시킨다는 것은 훼손된 영상 에 대해 와 를 알고 있을 때, 그 영향을 제거하는 방향으로 진행합니다.
Noise Restoration
우선 영상의 노이즈를 줄이는 방식을 알아보겠습니다.
Noise Model
노이즈를 줄이기 위해서는 노이즈가 어떻게 생겼는지 분석할 필요가 있습니다.
100%는 아니지만, 자연계에서 노이즈가 발생하는 방식은 여러 방식으로 모델링하여 추상화 할 수 있지만, 그 중에 대표적인 노이즈 모델에 대해서만 알아보겠습니다.
-
Gaussian Noise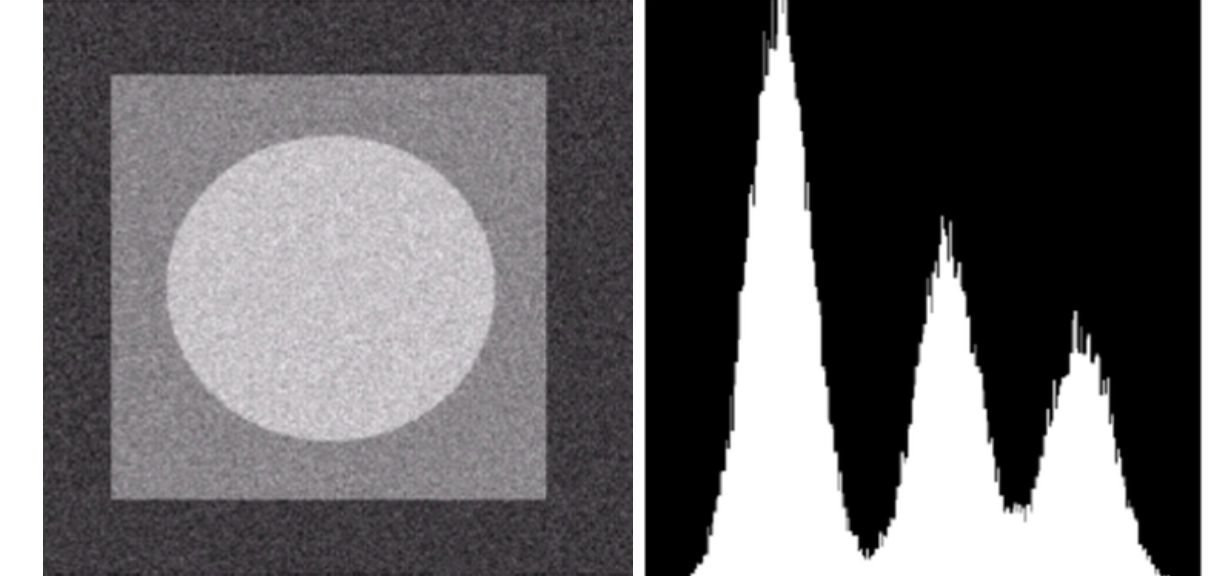
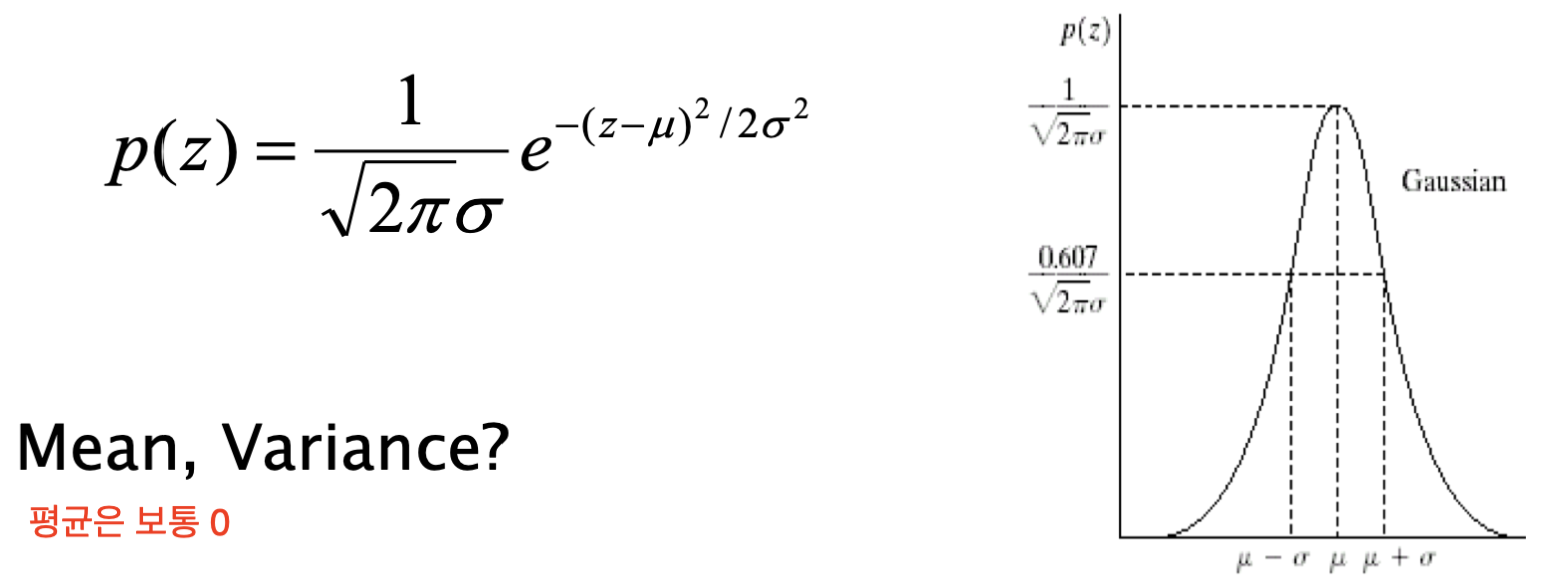
Gaussian Noise는 말 그대로 가우시안 분포를 따르는 노이즈 패턴으로 자연계에서 발견할 수 있는 형태를 갖습니다.
-
Uniform Noise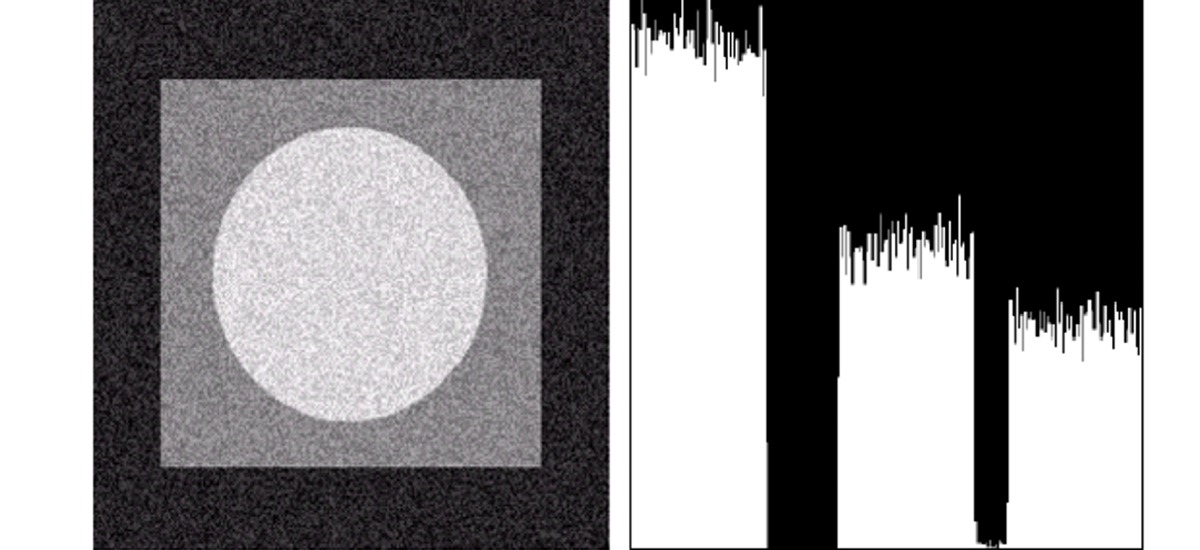
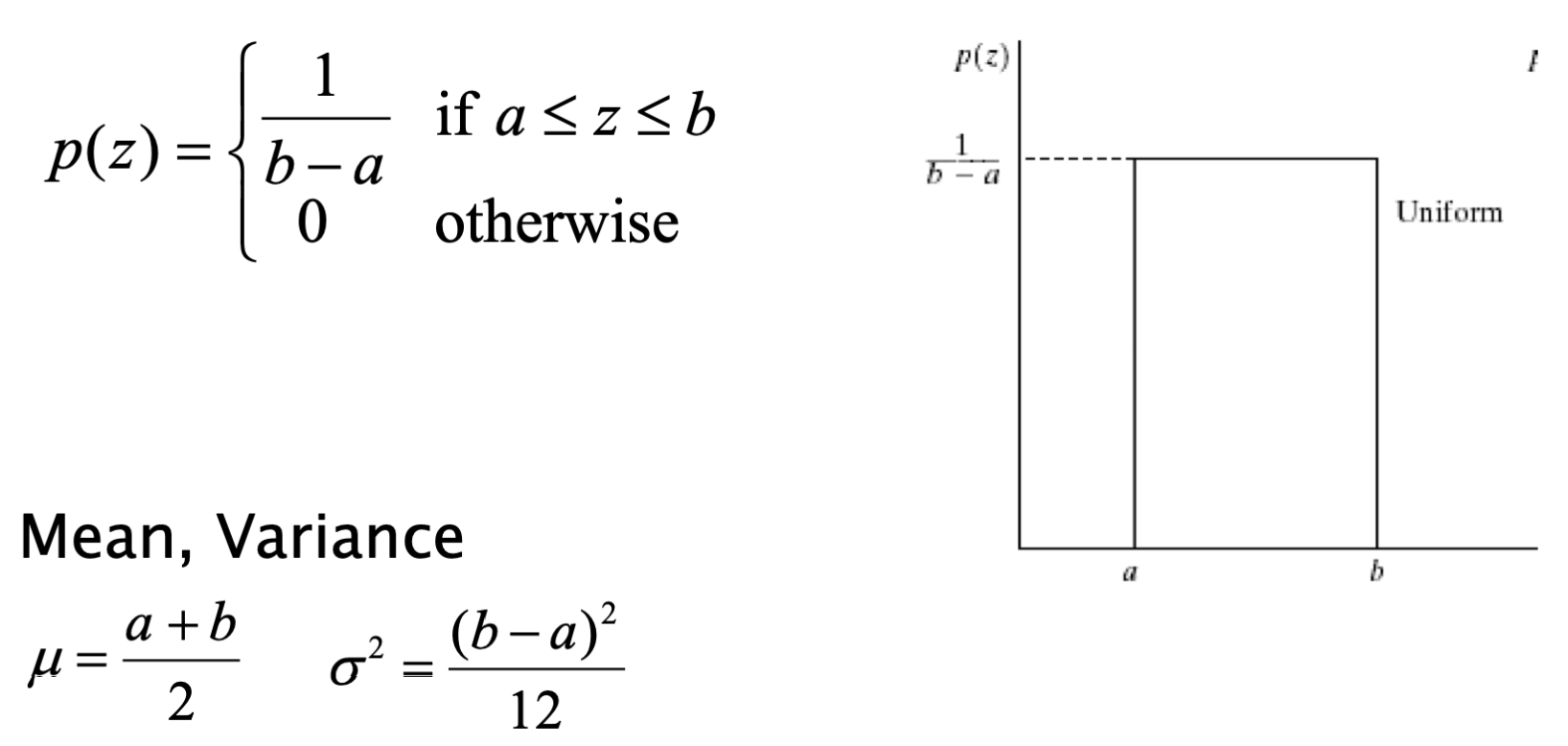
Uniform Noise는 동일한 확률 분포로 노이즈 패턴을 갖는 형태입니다.
-
Impulse (Salt-and-Pepper) Noise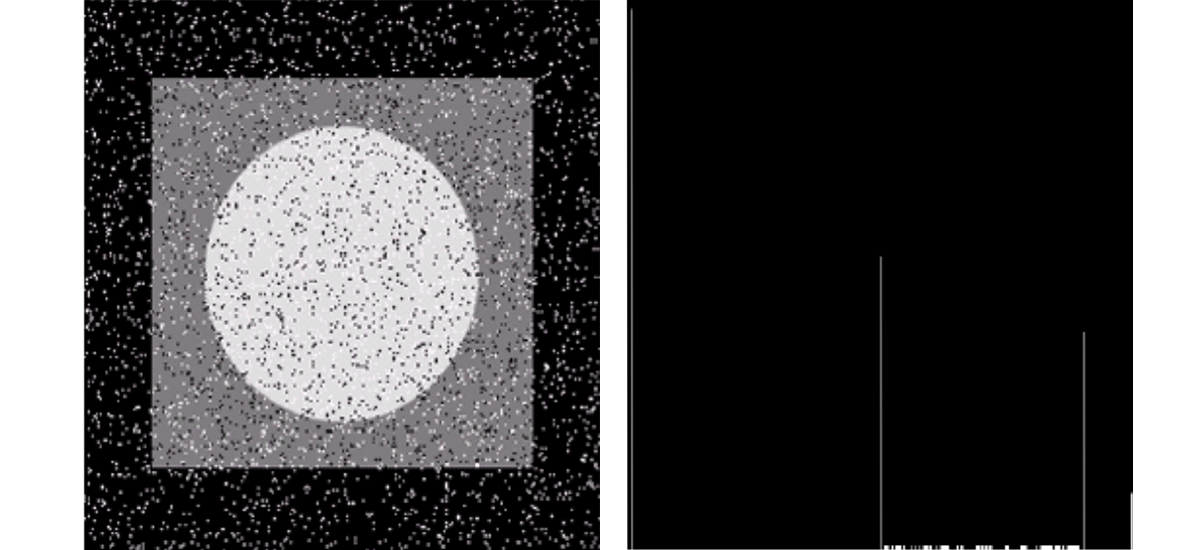
Salt-and-Pepper Noise는 일정 확률로 0 또는 255로 노이즈가 생기는 형태입니다.
Mean filter
Mean filter는 간단하게 말해서 기존에 많이 써왔던 smoothing filter와 동일합니다.
직역하면 평균값 필터 입니다.
즉, 전체적인 노이즈를 뿌옇게 만듦으로서 노이즈를 줄이는 것이기에 가우시안 노이즈에 효과적 입니다.
하지만, 영상의 디테일이 뭉게진다는 한계가 존재합니다.
Median filter
Median filter는 간단하게 말하면 특정 윈도우 내부의 값을 일렬로 정렬했을 때 가운데 값으로 대체하는 필터입니다.
직역하면 중앙값 필터 입니다.
즉, 0, 255와 같은 특이값을 중앙값으로 대체할 수 있기 때문에 Salt-and-Pepper 노이즈에 효과적 입니다.
하지만, 특정 윈도우 영역에 노이즈가 우연히 많이 분포하게 될 경우 복원이 불가능 합니다.
Adaptive Mean filter
Adaptive filter는 기존 필터와 다르게 영상의 특징을 반영하여 영역별로 다르게 필터링을 한다는 특징이 있습니다.
이 수식을 자세히 분석해봅시다.
가 0 이라는 뜻은 노이즈의 분산이 0이라는 뜻입니다. 즉, 노이즈가 없다는 뜻입니다.
이 때의 위 수식의 좌변은 만 남게 됩니다.
즉, 노이즈가 없는 영상은 별 다른 변환 없이 통과하게 됩니다.
가 에 비해 매우 높은 경우는?
노이즈의 분산에 비해 영상 자체의 분산이 매우 크다는 의미입니다.
즉, 영상의 변화율이 크기 때문에 디테일을 살리기 위해 필터()의 강도를 매우 약하게 설정해야 한다는 의미입니다.
실제로 /를 0.1과 같은 작은 값을 넣고 계산하면 필터의 영향력이 10%만 발휘된 변환 영상을 얻을 수 있습니다.
가 와 같은 경우는?
노이즈의 분산이 원본영상 + 노이즈의 분산과 같다는 의미입니다.
즉, 영상의 변화율이 없다는 의미이므로, 필터를 강하게 해서 디테일을 뭉게도 영향이 없는 상태입니다.
실제로 /에 1을 넣고 계산하면 100% 필터링된 변환 영상을 얻을 수 있습니다.
이렇듯, 노이즈의 분산()과 원본영상 + 노이즈의 분산()을 비교하여 필터()링 강도를 결정하면, 디테일이 필요한 부분은 필터링을 약하게, 디테일이 필요없는 부분은 필터링을 강하게 하여 노이즈를 줄일 수 있습니다.
Adaptive Median filter
이 경우엔 수식이 아닌, 일련의 명령어 집합으로 소개가 되어있기에 일단 소개하고 한 줄 한 줄 분석해보도록 하겠습니다.
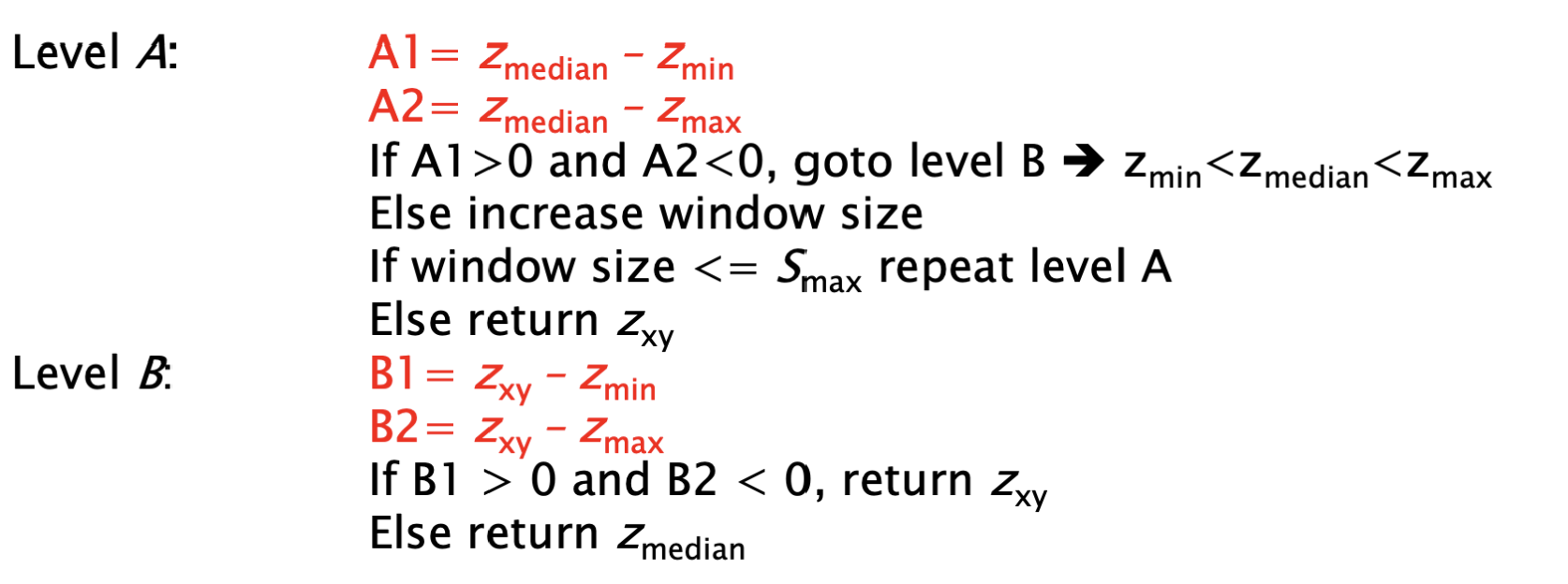
Line 1~3
median이 min, max가 아닌 값이 있다?
→ 주변에 salt, pepper도 있고, 원본 영상도 섞여있다.
→ B에서 후 처리.
Line 4~6
median이 min, max값 중 하나라면 해당 부분이 salt, pepper인지, 아니면 원본 영상 자체가 0, 255 값을 갖는건지 알 수 없다.
→ 윈도우 사이즈()를 키워서 A 재시도.
Line 7~9
픽셀 값이 min, max가 아니다?
→ 노이즈가 아니고 원본 값이다.
→ 원본 영상 그대로 리턴.
Line 10
픽셀 값이 min, max값 중 하나라면 해당 부분은 salt, pepper 노이즈일 것.
→ 중앙값 리턴.
Degradation Restoration
Estimating the Degradation Function
이제 노이즈는 어느정도 제거했다고 가정하고, 훼손 함수 를 추정하는 법을 알아봅시다.
추정만 해낼 수 있다면 이를 역으로 연산하는 과정을 통해서 제거할 수 있기 때문에 추정하는 대표적인 3가지 방식에 대해 알아봅시다.
-
Observation
부분의 H는 전체의 H와 같기 때문에 부분을 잘 선택하고, 노가다(?)를 통한 원본 영상을 만들어내어 그 변환과정(H)을 얻을 수 있다면, 전체 영상에 대한 복원이 가능해집니다.
-
Experimentation
impulse에 대한 H의 response를 보면 그 변환과정(H)을 얻을 수 있습니다.
-
Mathematical modeling
Inverse filter
이제 찾아낸 훼손 함수 H를 기반으로 복원을 해봅시다.
그 전에 앞서 가정했던 이미지 훼손 공식을 푸리에 변환한 식을 살펴봅시다.
노이즈(N)는 앞에서 많이 줄였기에 없다고 가정했을 때 우리가 복원해야 하는 원본 영상 F는 다음과 같이 정의할 수 있습니다.
복원이 완벽하게 이뤄질 수는 없기에 의 형태로 표현하였습니다.
이 식에서 부분을 유심히 살펴봅시다.
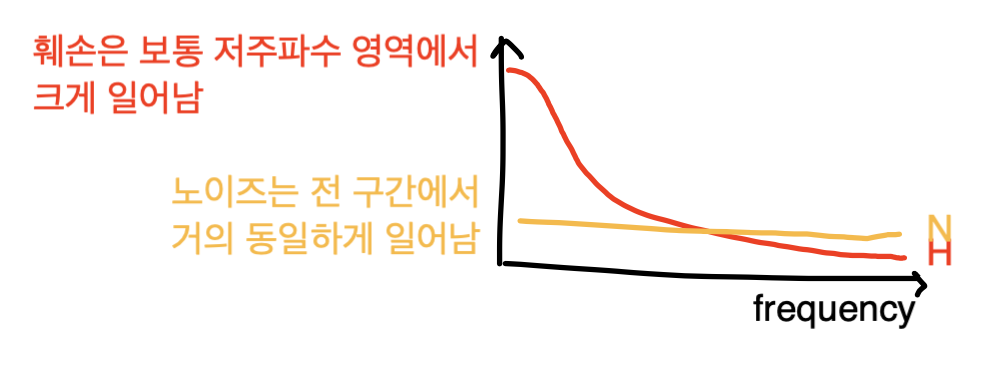
보통 노이즈는 모든 주파수 구간에서 동일하게 일어납니다.
하지만, 훼손은 보통 저주파수 영역에서 크게 일어나는 특징이 있습니다. (그렇다네요)
따라서 고주파수 영역에서는 값이 매우 커지는,
즉, 노이즈가 부스트되는 현상이 발생하게 됩니다.
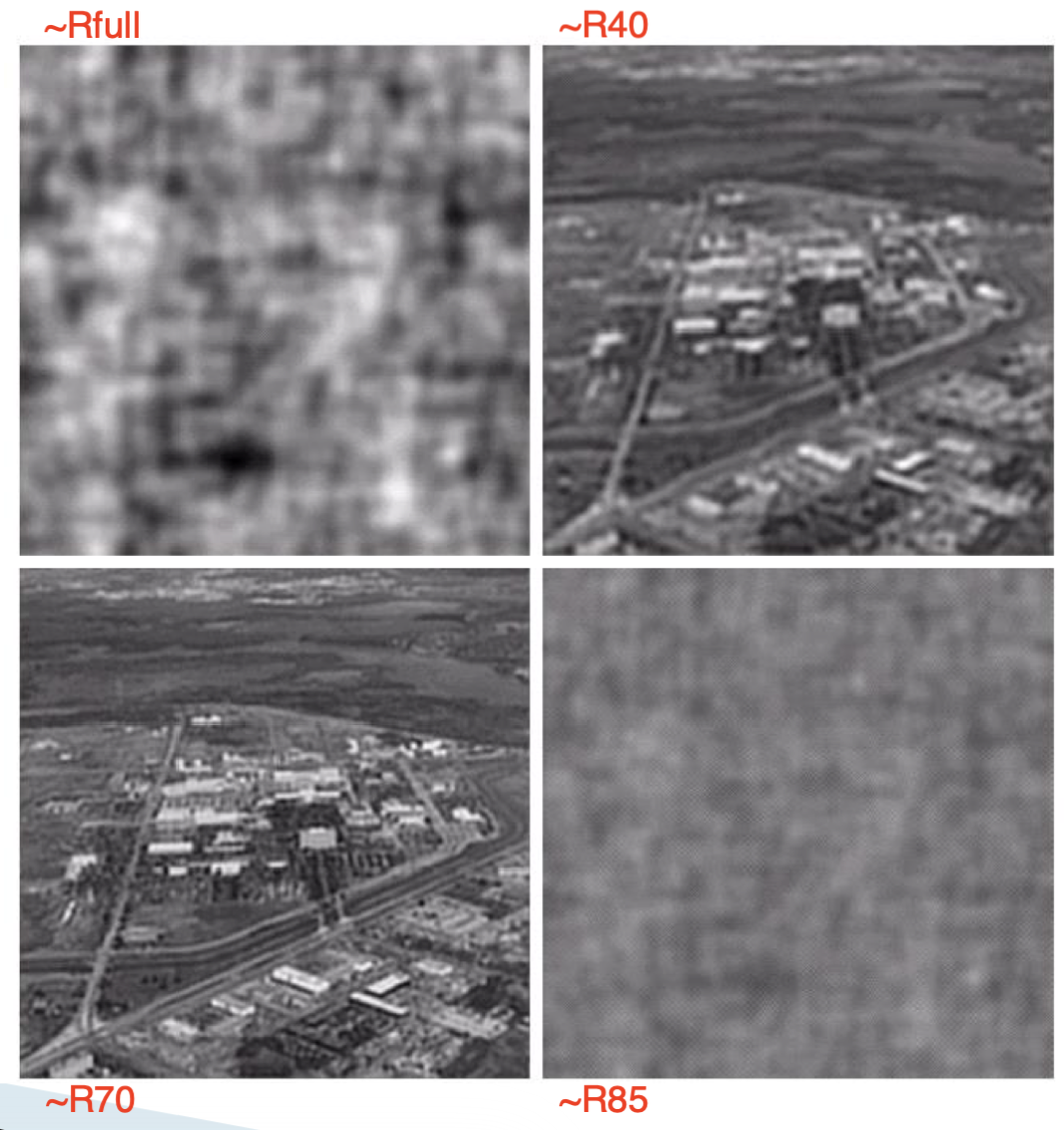
따라서 훼손을 줄이는 과정에서 적당히 lowpass 를 해주는 것이 영상 품질을 높이는데 도움이 될 수 있습니다.